Yaskawa elektrischer 0.095N.m industrieller 30W InsB Wechselstromservomotor 0.44A SGMAH-A3B1A21
Einzelteilbesonderen
Modell SGMAH-A3B1A21
Produkt-Art Wechselstromservomotor
Nennleistung 30w
Bewertetes Torque0.095 Nanometer
Nenndrehzahl 3000RPM
Stromversorgungs-Spannung 200vAC
Nennstrom 0.44Amps
ANDERE ÜBERLEGENE PRODUKTE
Yasakawa-Motor, Motor HC-, ha Fahrer SG Mitsubishi
Westinghouse-Module 1C-, 5X- Emerson VE, kJ
Honeywell TC, Motor A0- TK Fanuc
Rosemount-Übermittler 3051 - Yokogawa-Übermittler EJA-
Ansprechpartner: Anna
E-Mail: wisdomlongkeji@163.com
Mobiltelefon: +0086-13534205279
ÄHNLICHE PRODUKTE
SGMPH-15AAA21 SGMPH-15A1A-YR11 USAPEM-07YR23 SGM-01U3B4L
SGM-08A314S SGMAH-A3A1A4S SGMAH-02A1A4C SGMAS-01A2A41
SGMAH-A6AAA21 SGM-02VGNK13 SGMAS-A5ACA2C SGMAS-01ACA2C
SGMAS-02ACA21 SGMG-09A2A SGME-01AF14 SGM-01A314
SGMAH-01BAA4C SGM-02B314 SGMAS-06ACA2C SGMAS-07ARB-AB11
SGMAH-08A1A21 SGMG-05A2A SGMG-20A2AB SGMG-20A2A
SGMP-02B314C SGMPH-04AAA21 SGMAS-04A2A-FJ13 SGM-02U3B4L
SGM-02A314 SGMSH-20ACA21 SGMPH-15AAA-TE21 SGMPH-01AAE4CD
SGM-01AWSU12 SGM-01AGSU11 SGME-01AF14 SGM-02AGSU11
SGMP-04U314M SGMAH-04AAA-FJ12 USAREM-02CF2 USAREM-08FJ11
SGMGH-05ACA21 SGM-02U3B2L USASEM-18YR24 SGMAH-04AAAH761
SGMMJ-A3BABA1 SGMP-01U314CM SGM-01BX SGM-A3AFJ71 USAREM-02CE2KX
SGMS-55ASA SGMPH-01AAE-YA11 SGM-08AWFJ83 SGM-08AWFJ83X
SGMG-09AWAAB SGMS-15AWA-HG13 SGMG-05AWAAB SGMP-15AW16DP
USAREM-03DE2USAQEM-03-SU21 USAQEM-A6-SU31 USAQEM-05AA2KX USADEM-13-NT25
SGMP-04AS14 SGML-04AF12C SGMP-04A314E SGMPH-04A1E-TM21
SGME-04AF12 UGTMEM-03LSK21 SGM-02A612B SGMAH-A5A1A41
SGMPH-08AAA21 SGMSH-20ACA-FJ12
SGM-A5A312 SGM-A3A314 SGM-A3A321 SGMSH-15A2A21
USAREM-02CE2 SGM-02A5FJ12 SGMSH-08A1A4D SGM-08A312P
SGM-01B312 SGMAS-01A2A-AD11 SGMp-04AAA21
SGMAH-02A1F-AP11 SGMAH-A5AAA41 USAREM-03BE2KX SGMG-1AA2ABC
SGMGH-55DCA6C SGMG-30ASA SGMG-20VSAA3 SGMG-05AWAD SGMG-09ASA
SGMG-20VSR SGMG-09V2RC3 SGMG-20AWAA3 SGMG-30V2AAB SGMKS-20A3A21X2
Was geschieht, wenn das System in der Bewegung ist? Seien Sie der Ansicht, dass A2 eine typische Antriebs- und Bewegungskombination ist. Der Fehler E2 veranlaßt den Antrieb zu laufen und die Geschwindigkeit, an der er läuft, ist zum Wert von E2 proportional. Das größere E2 ist, schneller geht der Motor. Dieses sagt einem, dass der Ertrag (Feedback) nicht mit dem Befehl genau zusammentreffend ist, während in der Bewegung und tatsächlich im Ertrag F2 der Befehl C2 durch die Menge des Fehlers E2 verlangsamt. Schneller es geht, mehr ist die Verzögerung. Dieses ist für gute Master/Slave- Operation schlecht, die dass das Sklaven- F2 genau, erfordert dem Vorlagen-F1 zu folgen.
Wenn ein Software-Modul (S) zwischen F1 und C2 eingefügt wird, können einige Sachen vollendet werden.

Da der Gewinn der Sklavenschleife A2 worden bekannt, kann der Wert von E2 an jeder möglicher gewünschten Geschwindigkeit vorausgesagt werden. Dies heißt, dass der Befehl C2 durch diesen Berechnungs- Fehler E2 justiert werden kann, um zu verursachen
F2, zum mit F1 zusammentreffend zu sein. Das Software-Modul (S) ist entworfen, damit: C2 = F1 + E2
Wenn dieses vollendet wird, sind F1 und F2 zusammentreffend.
Auch da S ein Software-Modul ist, ist es möglich, es auf einige andere Arten zu manipulieren, die Flexibilität zur Verfügung zu stellen, die früher erwähnt wird.
Zum Beispiel wenn wir S = ließen (•K), wo K irgendwie konstant sein kann, dann existiert a total
flexibles Gangverhältnis, das nach Belieben geändert werden kann.
Schrittmotor Advantagesand benachteiligt
Vorteile
1. Der Rotationswinkel des Motors ist zum Inputimpuls proportional.
2. Der Motor hat volles Drehmoment am Stillstand (wenn die Wicklungen angezogen werden)
3. genaue Positionierung und Wiederholbarkeit der Bewegung, da gute Schrittmotoren eine Genauigkeit von haben
3 – 5% eines Schrittes und dieses Fehlers ist von einem Schritt zum folgenden nichtkumulativ.
4. ausgezeichnete Antwort zum Beginn des Stoppens/aufzuheben.
5. sehr zuverlässig, da es keine Kontaktbürsten im Motor gibt. Deshalb ist das Leben des Motors vom Leben des Lagers einfach abhängig.
6. Die Bewegungsantwort zu den Impulsen des digitalen Input liefert die Steuerung und stellt den Motor einfacher her
und weniger teuer steuern.
7. Es ist möglich, sehr langsame gebundene Rotation mit einer Last zu erzielen, die direkt zu verbunden wird
Welle.
8. Eine breite Palette von Drehzahlen kann verwirklicht werden, da die Geschwindigkeit zur Frequenz von proportional ist
Inputimpulse.

 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!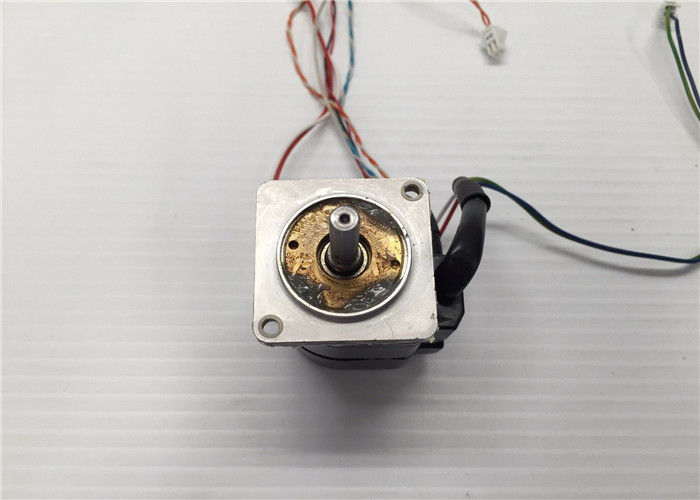
Gesamtbewertung
Rating-Schnappschuss
Nachstehend wird die Verteilung aller Ratings dargestellt.Alle Bewertungen