Industrie-Servomotor Yaskawa ELECTRIC 50W Wechselstrom-Servomotor SGMAH-A5AAAYU41
Schnelle Einzelheiten
Modell SGMAH-A5AAAYU41
Typ der Ware Wechselstromservomotor
Nennleistung 50w
Nenndrehmoment 0,159 Nm
Nenngeschwindigkeit 3000 RPM
Stromversorgungsspannung 200vAC
Nennstrom 0,64 Ampere
Ähnliche Produkte
| Die in Absatz 1 Buchstabe a genannten Anforderungen gelten nicht für die in Absatz 1 Buchstabe b genannten Fahrzeuge. |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Erzeugnisse. |
| Die in Absatz 1 Buchstabe a genannten Angaben sind zu beachten. |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Erzeugnisse. |
| Die in Absatz 1 genannten Anforderungen gelten nicht. |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Erzeugnisse. |
| Der Begriff "SGMAH-01A1A61D-OY" ist in Anhang I der Verordnung (EG) Nr. 216/2008 zu verstehen. |
| Die in Absatz 1 Buchstabe a genannten Angaben sind zu beachten. |
| Die in Absatz 1 Buchstabe a genannten Angaben sind zu beachten. |
| Der Begriff "SGMAH-01A1A-SM11" ist nicht mehr gültig. |
| Der Begriff "SGMAH-01A1A-SM21" wird in Anhang I aufgeführt. |
| Die in Absatz 1 genannte Nummer gilt nicht. |
| Die in Absatz 1 genannten Angaben sind zu beachten. |
| Die in Absatz 1 genannte Nummer gilt nicht. |
| Die in Absatz 1 Buchstabe a genannten Angaben sind zu beachten. |
| Der Begriff "SGMAH-01AAA41" ist nicht mehr gültig. |
| Die in Absatz 1 Buchstabe a genannten Angaben sind zu beachten. |
| Die in Absatz 1 Buchstabe b genannten Angaben sind zu beachten. |
| Die in Absatz 1 genannte Nummer gilt nicht. |
| Der Begriff "SGMAH-01AAA61" wird nicht verwendet. |
| SGMAH-01AAA61D-OY |
| SGMAH-01AAACH |
| SGMAH-01AAAG761 + SGDM-01ADA |
| Der Begriff "SGMAH-01AAAH12C" wird nicht verwendet. |
| Der Begriff "SGMAH-01AAAH161" |
| Die in Absatz 1 genannte Nummer gilt nicht für die Zulassung. |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Erzeugnisse. |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Erzeugnisse. |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Erzeugnisse. |
| Die in Absatz 1 Buchstabe b genannten Angaben sind zu beachten. |
| Die in Absatz 1 genannten Angaben sind zu beachten. |
| Der Begriff "SGMAH-01BBA21" wird in Anhang I aufgeführt. |
| Der Begriff "SGMAH-01BBABC" wird in Anhang I der Verordnung (EG) Nr. 396/2005 geändert. |
| Der Begriff "SGMAH-01BBA-TH12" wird in Anhang I der Verordnung (EG) Nr. 396/2005 geändert. |
| SGMAH-02A1A21 |
| Der Begriff "SGMAH-02A1A61D-0Y" ist in Anhang I der Verordnung (EG) Nr. 216/2008 zu verstehen. |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Erzeugnisse. |
| Der Begriff "SGMAH-02A1A6C" wird in Anhang I aufgeführt. |
| SGMAH-02A1A-DH12 |
| Der Begriff "SGMAH-02A1A-DH21" ist in Anhang I der Verordnung (EG) Nr. 1907/2006 zu verstehen. |
| Die Kommission hat die Kommission aufgefordert, die folgenden Maßnahmen zu treffen: |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Produkte. |
| Der Begriff "SGMAH-02A1A-SM21" ist in Anhang I zu ersetzen. |
| Der Begriff "SGMAH-02A1A-YR21" ist in Anhang I der Verordnung (EG) Nr. 216/2008 zu verstehen. |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Erzeugnisse. |
| Die in Absatz 1 Buchstabe a genannten Angaben werden in Anhang I der Verordnung (EU) Nr. 182/2011 aufgeführt. |
| Die in Absatz 1 Buchstabe b genannten Angaben sind zu beachten. |
| Die in Absatz 1 genannten Anforderungen gelten nicht für die in Absatz 1 genannten Erzeugnisse. |
| Der Begriff "SGMAH-02AAA2C" wird in Anhang I aufgeführt. |
| Die in Absatz 1 Buchstabe a genannten Angaben werden in Anhang I der Verordnung (EU) Nr. 528/2012 aufgeführt. |
| SGMAH-02AAA41 |
| Die in Absatz 1 Buchstabe a genannten Angaben werden in Anhang I der Verordnung (EG) Nr. 396/2005 geändert. |
Niederspannungsschutz
Niedrigspannungsabschaltung - Die Schutzvorrichtung schaltet den Motor ab, wenn die Versorgungsspannung unter einen vorgegebenen Wert fällt.Der Motor muss bei Wiederaufnahme der normalen Versorgungsspannung manuell neu gestartet werden..
Niedrigspannungsfreigabe - Schutzvorrichtung unterbricht den Stromkreis, wenn die Versorgungsspannung unter einen vorgegebenen Wert fällt, und stellt den Stromkreis wieder her, wenn die Versorgungsspannung wieder normal ist.
Phasefehlerschutz
Unterbricht die Stromversorgung in allen Phasen eines dreiphasigen Stromkreises bei Ausfall einer der Phasen.
C Normaler Schließ- und Überlastschutz schützt einen Mehrphasenmotor möglicherweise nicht ausreichend vor einem schädlichen Einphasenbetrieb.Der Motor wird weiterhin funktionieren, wenn eine Phase verloren geht..
C In den verbleibenden Statorkreisen können große Ströme entstehen, die schließlich ausbrennen.
Der C-Phase-Ausfallschutz ist der einzige wirksame Weg, um einen Motor richtig vor Einphasen zu schützen.
Was ist notwendig, um bei koordinierten Bewegungen die Genauigkeit zu bewahren?
Die Größe des Fehlers spielt keine Rolle, wenn der verfolgte Pfad eine einseitige Bewegung ist.Man konnte es nicht entdecken.Wenn zwei Achsen gleichzeitig bewegt werden, um einen geneigten Schnitt zu erzeugen, können sich große Fehler entwickeln.Abbildung 2 zeigt eine Bewegung auf zwei Achsen entlang einer Neigung von 45°, wobei
Der Gewinn der X-Achse ist doppelt so groß wie der der Y-Achse, also ist der X-Achse-Fehler (EX) die Hälfte des Y-Achse-Fehlers (EY).Der resultierende Pfad wird je nach Richtung von dem befohlenen Weg verschoben.Wenn die Gewinne der beiden Achsen im Beispiel identisch wären, wären EX und EY identisch und die Maschine würde den Bewegungsauftrag verzögern,aber es wäre genau auf dem gewünschten WegWenn die Gewinne genau abgestimmt sind, sind Richtung, Geschwindigkeit und Neigungswinkel nicht mehr wichtig.Solange der befahlene Pfad auf einer geraden Linie bleibtBei der Erhaltung der Genauigkeit für lineare Bewegungen wird es eine Übung, um die Gewinne abzugleichen.Dies erfordert die Abwägung der reaktionsschnelleren Achsen auf die schlechteste Achse.Bei vielen Systemen können die Gewinne digital (und damit präzise) eingestellt werden.Diese Anpassung erfolgt, indem jede Achse mit dem gleichen Mittelbereichswert gesteuert und die Potentiometer so eingestellt werden, dass gleiche Fehler erzielt werden..
Bei kreisförmigen Bewegungen, bei denen der befahlene Pfad durch kreisförmige Interpolation erzeugt wird, ist das eine andere Geschichte.Mit vergleichtem GewinnBei niedrigen Geschwindigkeiten und hohen Kreisradien sind die Fehler jedoch vernachlässigbar, da das Verhältnis von Geschwindigkeit zu Kreisradius steigt.,der Fehler in der Kreisgröße
Dies wirft die Frage auf: Wird der resultierende Kreis größer oder kleiner sein als der kommandierte?
(Denken Sie darüber nach, bevor Sie weiterlesen.)

Andere übergeordnete Erzeugnisse
Yasakawa Motor, Fahrer SG- Mitsubishi Motor HC-, HA-
Westinghouse Module 1C, 5X, Emerson VE, KJ
Honeywell TC-, TK-Fanuc-Motor A0-
Rosemount-Sender 3051- Yokogawa-Sender EJA-

 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!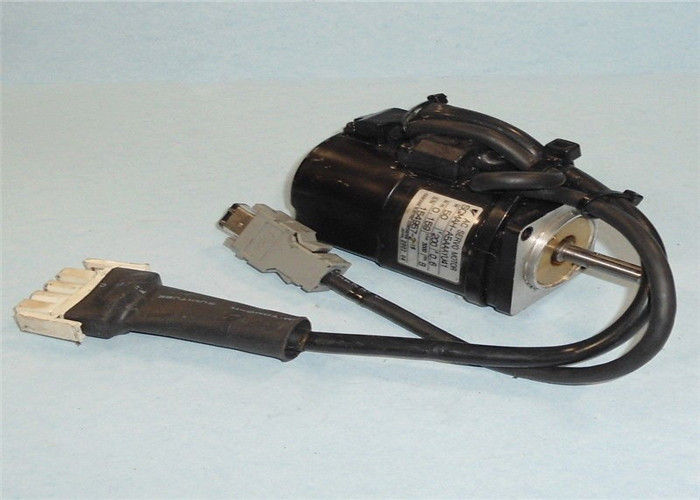
Gesamtbewertung
Rating-Schnappschuss
Nachstehend wird die Verteilung aller Ratings dargestellt.Alle Bewertungen