SGMDH Sigma II Japan YASKAWA 15,3 N-m SERVO MOTOR 3200W SGMDH-32A2A-YR14
Spezifikationen
Modell SGMDH-32A2A-YR14
Produkttyp AC-Servomotor
Nennausgangsleistung 200 W
Nennmoment 15,3 Nm
Nenndrehzahl 2000 U/min
Versorgungsspannung 200 V AC
Nennstrom 20,9 Ampere
WEITERE ÜBERLEGENE PRODUKTE
Yasakawa Motor, Treiber SG- Mitsubishi Motor HC-,HA-
Westinghouse Module 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Fanuc Motor A0-
Rosemount Transmitter 3051- Yokogawa Transmitter EJA-
Ähnliche ProdukteSGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
Das Vorhandensein dieses hochpermeablen Materials bewirkt, dass der magnetische Fluss größtenteils auf die Pfade beschränkt wird, die durch die Statorstruktur definiert sind, in der gleichen Weise, wie Ströme auf die Leiter eines elektronischen Schaltkreises beschränkt sind. Dies dient dazu, den Fluss an den Statorpolen zu konzentrieren. Der
Abbildung 4. Prinzip eines Scheibenmagnetmotors, entwickelt von Portescap.= N N N N S S S 3
Abbildung 5. Magnetischer Flussweg durch einen Zweiphasen-Schrittmotor mit einer Verzögerung zwischen Rotor und Stator.
Abbildung 6. Unipolar und bipolar gewickelte Schrittmotoren. Das vom Motor erzeugte Drehmoment ist proportional zur Intensität des magnetischen Flusses, der erzeugt wird, wenn die Wicklung erregt wird.
Die grundlegende Beziehung, die die Intensität des magnetischen Flusses definiert, wird durch Folgendes definiert:
H = (N × i) ÷ l wobei:
N = Die Anzahl der Wicklungswindungen
i = Strom
H = Magnetfeldstärke
l = Magnetische Flussweglänge
Diese Beziehung zeigt, dass die magnetische Flussdichte und folglich das Drehmoment proportional ist zu
der Anzahl der Wicklungswindungen und dem Strom und umgekehrt proportional zur Länge des magnetischen Flusswegs.
Aus dieser grundlegenden Beziehung kann man ersehen, dass ein Schrittmotor gleicher Baugröße sehr unterschiedliche Drehmomentleistungen haben kann, indem man einfach die Wicklungsparameter ändert. Detailliertere Informationen darüber, wie sich die Wicklungsparameter auf die Ausgangsleistung des Motors auswirken, finden Sie in der Anwendungshinweis mit dem Titel „Grundlagen der Treiberschaltung“.
Im Gegensatz zu Gleichstrommotoren können Sie bei Servomotoren die Motorwelle mit einem Steuersignal an einer bestimmten Position (Winkel) positionieren. Die Motorwelle hält diese Position, solange das Steuersignal nicht geändert wird. Dies ist sehr nützlich für die Steuerung von Roboterarmen, unbemannten Flugzeugoberflächen oder jedem Objekt, das Sie in einem bestimmten Winkel bewegen und in seiner neuen Position halten möchten.
Servomotoren können nach Größe oder Drehmoment, dem sie standhalten können, in Mini-, Standard- und Riesen-Servos eingeteilt werden. Normalerweise können Mini- und Standard-Servomotoren direkt von Arduino mit Strom versorgt werden, ohne dass eine externe Stromversorgung oder ein Treiber erforderlich ist.
Normalerweise werden Servomotoren mit Armen (Metall oder Kunststoff) geliefert, die mit dem zu bewegenden Objekt verbunden sind (siehe Abbildung unten rechts).
Der dritte Pin akzeptiert das Steuersignal, das ein Pulsweitenmodulationssignal (PWM) ist. Es kann leicht von allen Mikrocontrollern und Arduino-Boards erzeugt werden.
Dies akzeptiert das Signal von Ihrem Controller, das ihm mitteilt, in welchem Winkel es sich drehen soll. Das Steuersignal ist relativ einfach im Vergleich zu dem eines Schrittmotors. Es ist nur ein Impuls unterschiedlicher Länge. Die Länge des Impulses entspricht dem Winkel, in den sich der Motor dreht.
Blockdiagramm der Steuerung von Servomotoren
Ein extern angelegtes Impulssignal (wenn es sich um den Impulseingabetyp handelt) und die von dem Servomotor-Encoder erkannte Drehung werden gezählt, und die Differenz (Abweichung) wird an die Drehzahlregeleinheit ausgegeben. Dieser Zähler wird als Abweichungszähler bezeichnet.
Während der Motordrehung wird ein akkumulierter Impuls (Positionsabweichung) im Abweichungszähler erzeugt und so gesteuert, dass er auf Null geht.
Die Funktion zum Halten der aktuellen Position (Position halten durch Servoregelung) wird mit einer Positionsschleife (Abweichungszähler) erreicht.

 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!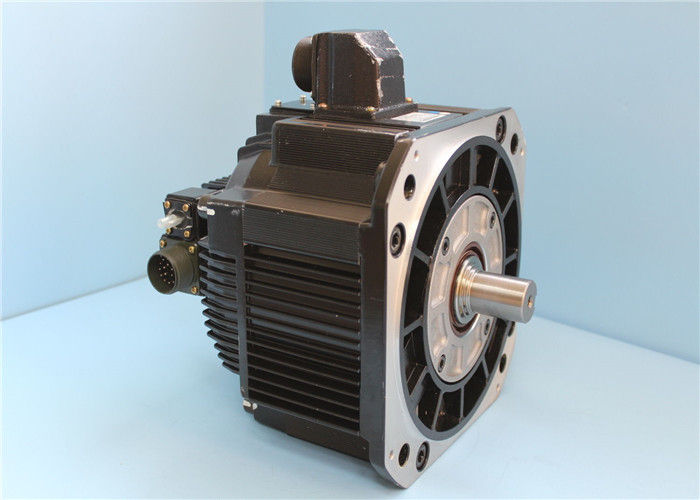
Gesamtbewertung
Rating-Schnappschuss
Nachstehend wird die Verteilung aller Ratings dargestellt.Alle Bewertungen