Yaskawa Electric Servo Motor InsB 200V SJME-04AMB41-0Y 400W Industrieller Servomotor
Spezifikationen
Strom: 2,0A
Spannung: 200V
Leistung: 400W
Nenndrehmoment: 1,27Nm
Max. Drehzahl: 3000 U/min
Encoder: 17-Bit Absolutwert-Encoder
Trägheitsmoment JL kg¡m2¢ 10−4: 0,026
Welle: gerade ohne Keil
ANDERE ÜBERLEGENE PRODUKTE
Yasakawa Motor, Treiber SG- Mitsubishi Motor HC-,HA-
Westinghouse Module 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Fanuc Motor A0-
Rosemount Transmitter 3051- Yokogawa Transmitter EJA-
Ansprechpartner: Anna
E-Mail: wisdomlongkeji@163.com
Handy: +0086-13534205279
Ähnliche Produkte
SJDE-01APA
SJDE-02APA
SJDE-04APA
SJDE-04APA+SJME-04AMB41
SJDE-08APA
SJME-01AMA41
SJME-04AMA41
SJME-04AWA41
SJME-08AWA41
Der Wechselrichter besteht aus drei Halbbrückeneinheiten, bei denen der obere und der untere Schalter komplementär gesteuert werden, d.h. wenn der obere eingeschaltet ist, muss der untere ausgeschaltet sein und umgekehrt. Da die Ausschaltzeit des Leistungshalbleiters länger ist als seine Einschaltzeit, muss zwischen dem Ausschalten eines Transistors der Halbbrücke und dem Einschalten seines komplementären Bauteils eine Totzeit eingefügt werden. Die Ausgangsspannung wird meist durch Pulsweitenmodulation (PWM) erzeugt, bei der eine gleichschenklige Dreieck-Trägerwelle mit einer Sinus-Modulationswelle mit Grundfrequenz verglichen wird. Die natürlichen Schnittpunkte bestimmen die Schaltpunkte der Leistungshalbleiter eines Halbbrückenwechselrichters. Diese Technik ist in Abbildung 3-6 dargestellt. Die 3-Phasen-Spannungswellen sind um 120° zueinander versetzt, und somit kann ein 3-Phasen-Motor versorgt werden.
Die beliebtesten Leistungshalbleiter für Motorsteuerungsanwendungen sind Power-MOSFETs und IGBTs. Ein Power-MOSFET ist ein spannungsgesteuerter Transistor. Er ist für den Hochfrequenzbetrieb ausgelegt und hat einen geringen Spannungsabfall, wodurch er geringe Leistungsverluste aufweist. Die Empfindlichkeit gegenüber der Sättigungstemperatur begrenzt jedoch den Einsatz von MOSFETs in Hochleistungsanwendungen. Ein Insulated-Gate Bipolar Transistor (IGBT) wird über einen MOSFET an seiner Basis gesteuert. Der IGBT benötigt einen geringen Ansteuerstrom, hat eine schnelle Schaltzeit und eignet sich für hohe Schaltfrequenzen. Der Nachteil ist der höhere Spannungsabfall des Bipolartransistors, der höhere Leitungsverluste verursacht.

Die Vektorregelung ist die beliebteste Regelungstechnik für AC-Asynchronmotoren. In speziellen Bezugssystemen ist der Ausdruck für das elektromagnetische Drehmoment der Maschine mit glattem Luftspalt ähnlich dem Ausdruck für das Drehmoment der fremderregten Gleichstrommaschine. Bei Asynchronmaschinen erfolgt die Regelung üblicherweise im Bezugssystem (d-q), das an den Rotorflussraumvektor gekoppelt ist. Deshalb erfordert die Implementierung der Vektorregelung Informationen über den Betrag und den Raumwinkel (Position) des Rotorflussraumvektors. Die Statorströme der Asynchronmaschine werden durch Transformation in das d-q-Koordinatensystem, dessen direkte Achse (d) mit dem Rotorflussraumvektor ausgerichtet ist, in Fluss- und Drehmomentkomponenten aufgeteilt. Das bedeutet, dass die q-Achsenkomponente des Rotorflussraumvektors immer Null ist:

 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!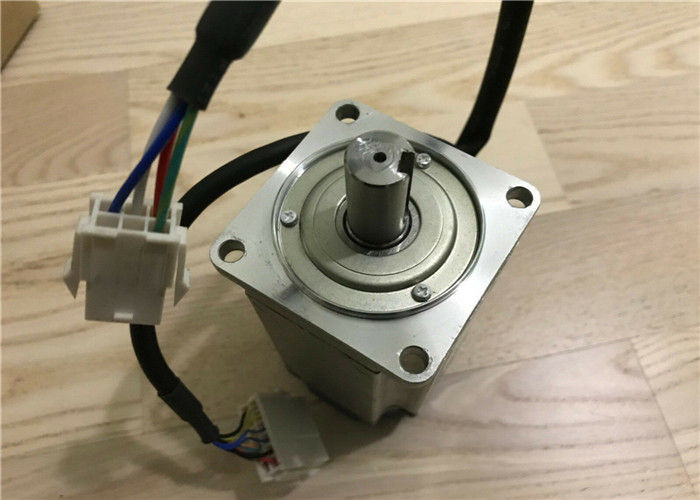
Gesamtbewertung
Rating-Schnappschuss
Nachstehend wird die Verteilung aller Ratings dargestellt.Alle Bewertungen