YASKAWA SGMAH Sigma II 0,91A 100W AC SERVO MOTOR 3000 U/min SGMAH-01AAA41-Y1
Spezifikationen
Hersteller: Yaskawa
Produktnummer: SGMAH-01AAA41-Y1
Beschreibung: SGMAH-01AAA41-Y1 ist ein von Yaskawa hergestellter AC-Servomotor
Servomotortyp: SGMAH Sigma II
Nennausgangsleistung: 10W (0,07PS)
Stromversorgung: 200V
Encoder-Spezifikationen: 13-Bit (2048 x 4) Inkremental-Encoder; Standard
Revisionsstand: Standard
Wellenspezifikationen: Gerade Welle ohne Keilnut
Zubehör: Standard; ohne Bremse
Option: Keine
Typ: keine
WEITERE ÜBERLEGENE PRODUKTE
Yasakawa Motor, Treiber SG- Mitsubishi Motor HC-,HA-
Westinghouse Module 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Fanuc Motor A0-
Rosemount Transmitter 3051- Yokogawa Transmitter EJA-
SÄhnliche Produkte
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
Schrittmotoren können oft ein als Resonanz bezeichnetes Phänomen bei bestimmten Schrittraten aufweisen. Dies kann als plötzlicher Verlust oder Abfall des Drehmoments bei bestimmten Drehzahlen gesehen werden, was zu verpassten Schritten oder dem Verlust der Synchronität führen kann. Es tritt auf, wenn die Eingangs-Schrittimpulsrate mit der Eigenfrequenz des Rotors übereinstimmt. Oft gibt es einen Resonanzbereich um den Bereich von 100 – 200 pps und auch einen im Bereich der hohen Schrittimpulsrate. Das Resonanzphänomen eines Schrittmotors resultiert aus seiner Grundkonstruktion und daher
ist es nicht möglich, es vollständig zu eliminieren. Es ist auch von den Lastbedingungen abhängig. Es kann reduziert werden
indem der Motor in Halb- oder Mikroschrittmodi betrieben wird.
Wenn ein Schrittimpuls an einen Schrittmotor angelegt wird, verhält sich der Rotor in der durch die obige Kurve definierten Weise.
Die Schrittzeit t ist die Zeit, die die Motorwelle benötigt, um einen Schrittwinkel zu drehen, sobald der erste Schrittimpuls angelegt wurde.
Diese Schrittzeit ist stark abhängig vom Verhältnis von Drehmoment zu Trägheit (Last) sowie von der Art des verwendeten Treibers.
Da das Drehmoment eine Funktion der Verschiebung ist, folgt daraus, dass auch die Beschleunigung dies sein wird. Daher wird bei Bewegungen in großen Schrittinkrementen ein hohes Drehmoment entwickelt und folglich eine hohe Beschleunigung. Dies kann zu Überschwingungen und Klingeln führen, wie gezeigt. Die Einschwingzeit T ist die Zeit, die diese Schwingungen oder das Klingeln benötigen, um aufzuhören. In bestimmten Anwendungen kann dieses Phänomen unerwünscht sein. Es ist möglich, dieses Verhalten durch Mikroschritte des Schrittmotors zu reduzieren oder zu eliminieren. Für weitere Informationen zum Mikroschrittverfahren konsultieren Sie bitte die Mikroschritt-Notiz.


 Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!
Ihre Nachricht muss zwischen 20 und 3.000 Zeichen enthalten!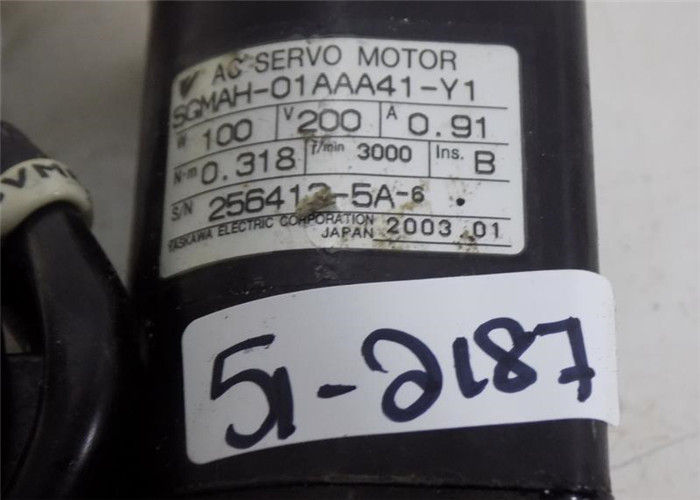
Gesamtbewertung
Rating-Schnappschuss
Nachstehend wird die Verteilung aller Ratings dargestellt.Alle Bewertungen